Programmation modules HC05/HC06
Appairage des modules Bluetooth
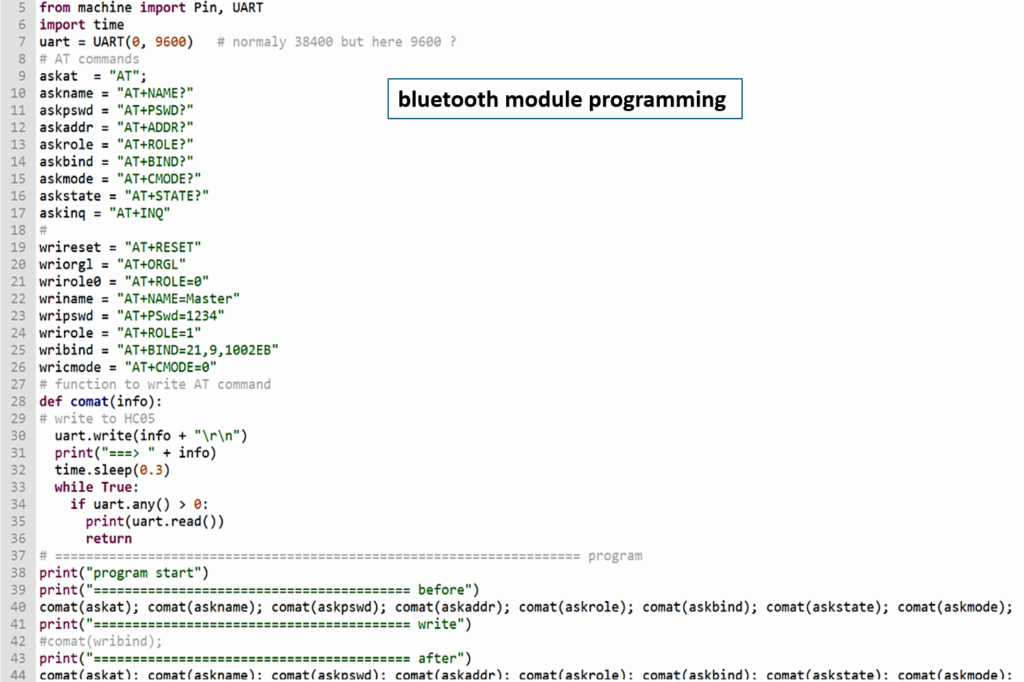
Ce simple programme micro-python (config bluetooth.py) permet de configurer sans peine les deux modules.
Lignes 9 à 17 : Commandes AT à utiliser pour lire des informations.
Lignes 19 à 26 : Commandes AT à utiliser pour écrire des informations.
Lignes 28 à 36 : La fonction qui envoie la commande AT en argument et affiche le résultat.
Lignes 39 à 40 : Affiche les informations du module en envoyant plusieurs commandes AT.
Lignes 41 à 42 : Programme, suivant le besoin, le module en utilisant les AT (lignes 19 à 26)
Lignes 43 à 44 : Affiche les informations du module en envoyant plusieurs commandes AT.
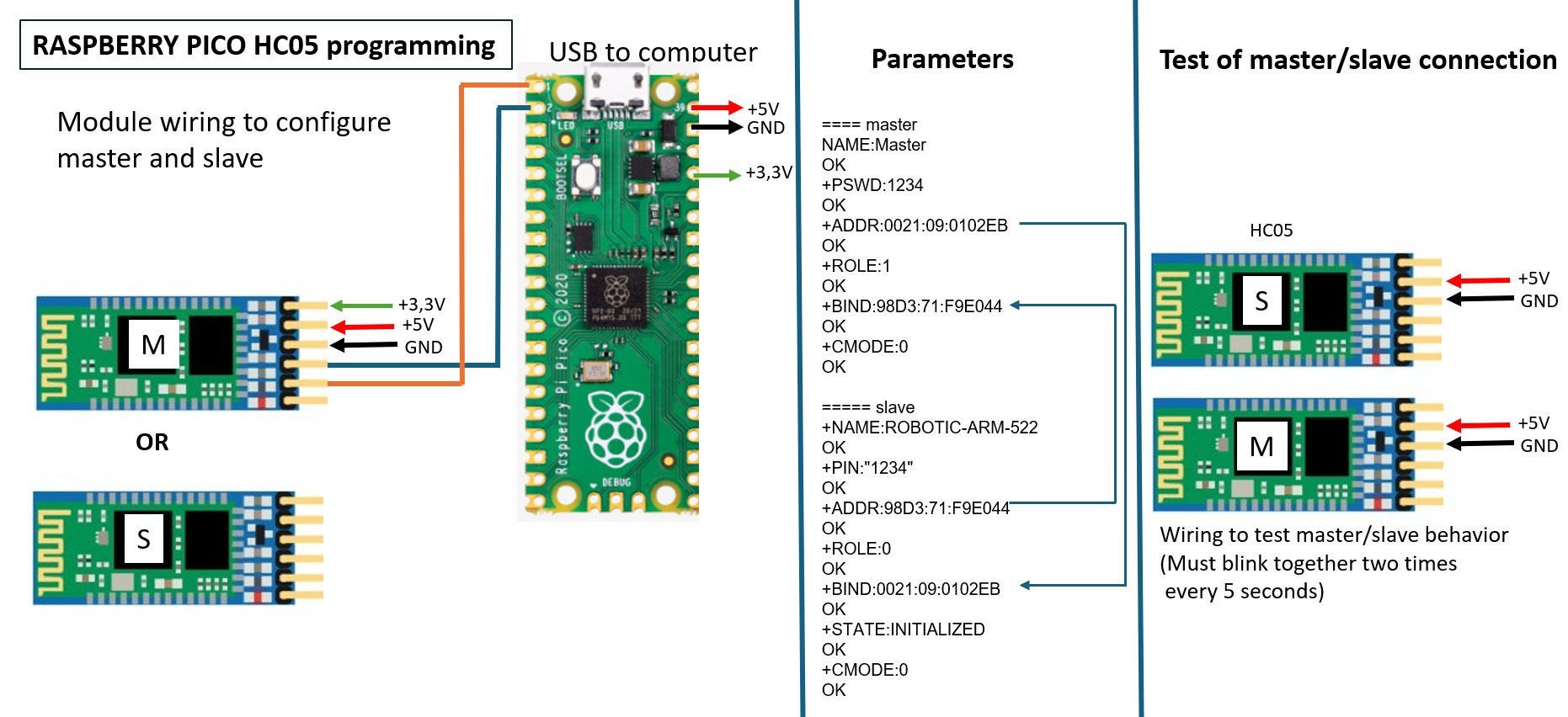
Un exemple de configuration est donné avec les paramètres à configurer (pswd, rôle et bind).
Afin de mettre le module en mode AT il convient de connecter la pin « enable » à 3.3V avant la mise sous tension.
Pour tester l’appairage on alimente les deux modules. Après quelques secondes les deux modules vont clignotés toutes les cinq secondes comme indiqué sur le schéma).

Laisser un commentaire