Programme : Les déclarations et définitions
Le programme se compose de trois fichiers : un programme principal et deux fichiers contenant des fonctions. L’utilisation de fonctions évite la répétition de code et facilite la lisibilité du programme. Divers fichiers sont disponibles au
téléchargement ici et en particulier des informations sur le contrôleur PWM.
Déclaration de l’afficheur LCD.
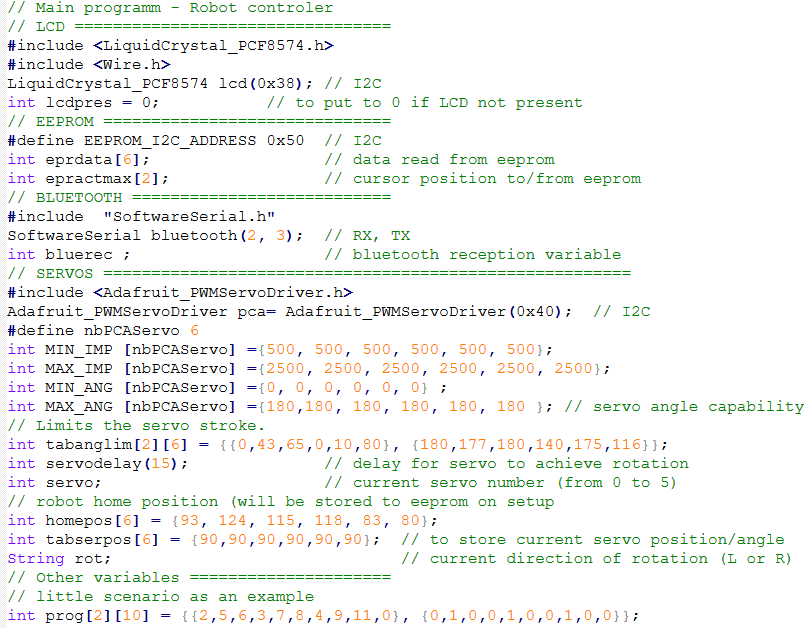
Si l’afficheur n’est pas utilisé on pourra laisser la déclaration (éventuellement ajouter la bibliothèque à Arduino même si non utilisée par la suite). La variable « lcdpres » sera initialisée à 0.
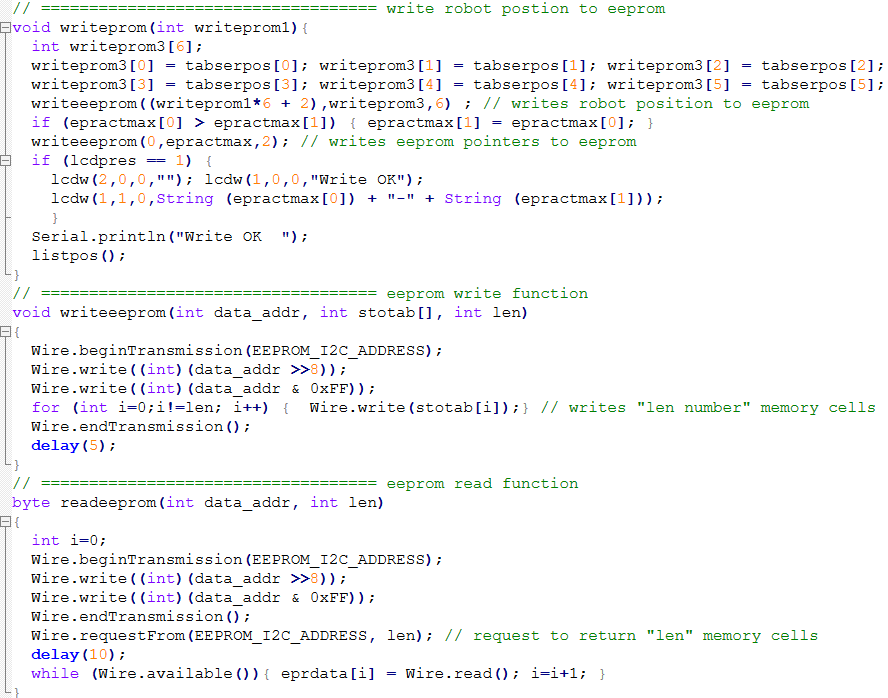
Déclaration de la mémoire Eeprom.
L’adresse sur le bus I2C est 0x50. Le tableau « eprdata » sert de tampon pour les échanges avec la mémoire. Il comporte 6 positions/octets correspondants aux 6 servos et à une position donnée du bras. La course d’un servo allant de 0 à 180 cette information est stockée dans un octet. On utilisera ainsi 6 octets par position du bras. On appellera par la suite ces 6 valeurs une séquence et on échangera des séquences avec la mémoire.
On utilise deux pointeurs ou numéros de séquences. Un pointeur pour le numéro de la séquence actuelle et un pointeur pour le numéro de la dernière séquence enregistrée dans la mémoire Eeprom.
C’est le tableau « eptactmax » qui contient les valeurs de ces deux pointeurs.
Déclaration du Bluetooth.
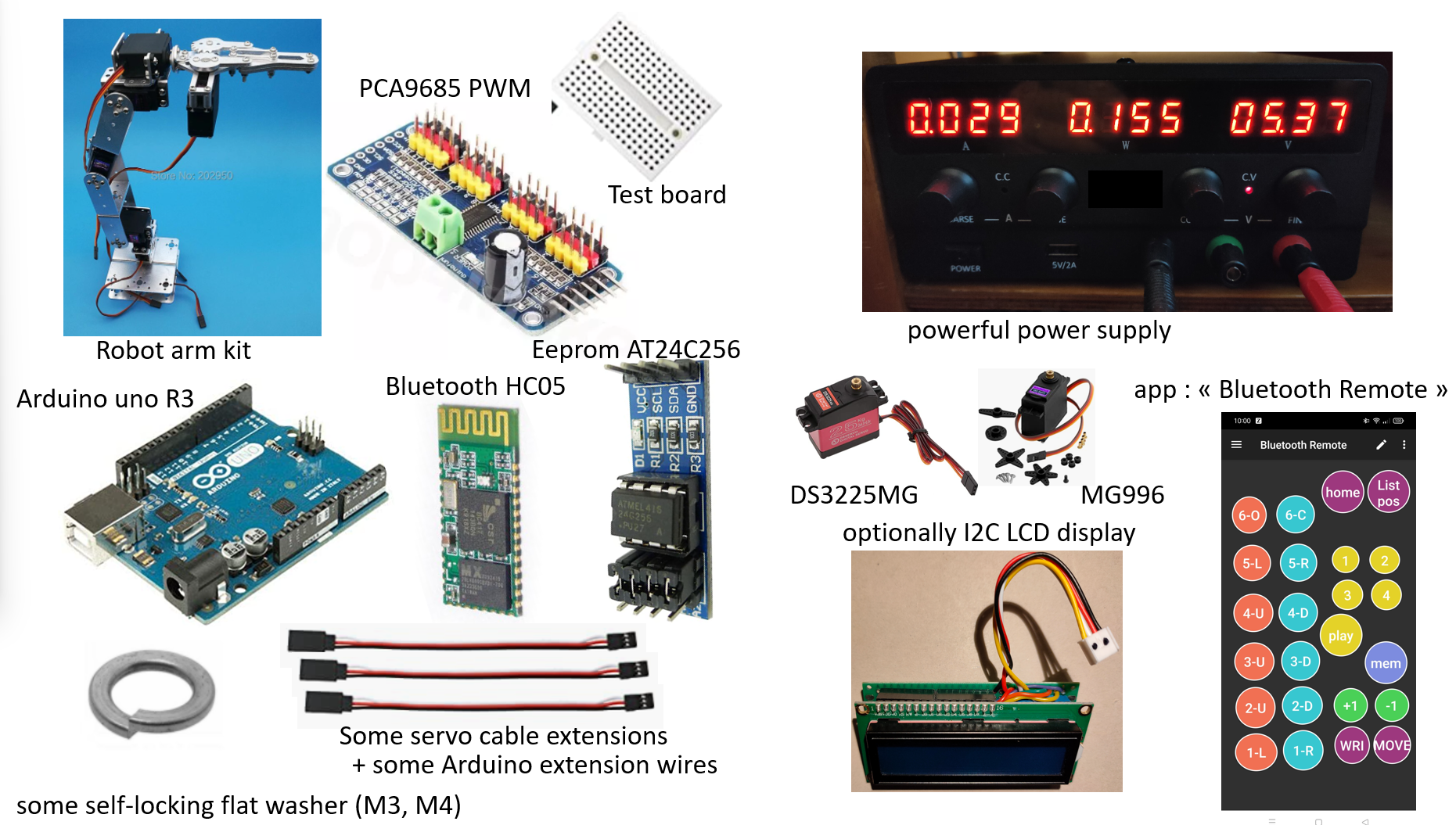
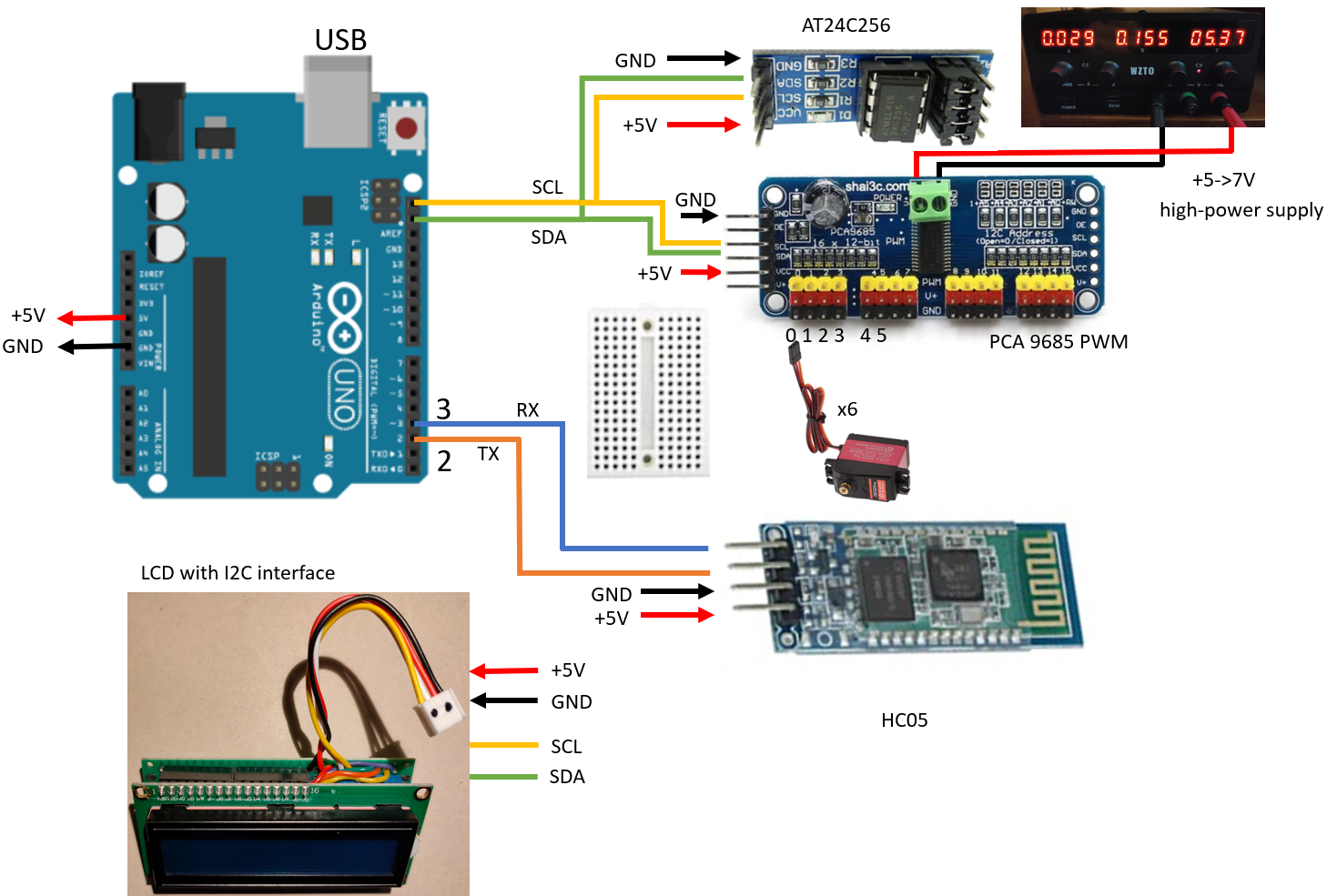
Le module est câblé sur les positions 2 et 3 de l’Arduino. La variable « bluerec » contient le caractère reçu. Dans ce projet l’application Remote n’enverra qu’un caractère par action.
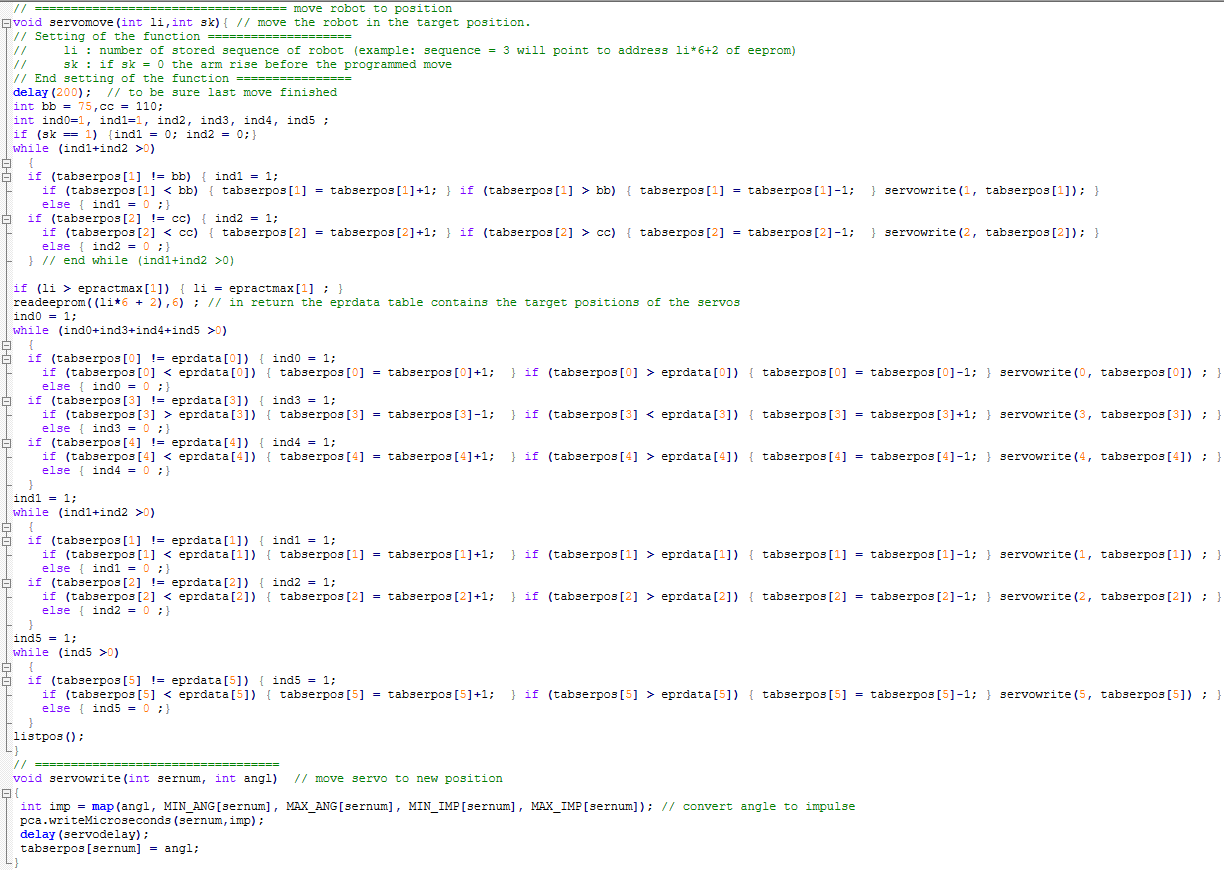
Déclarations pour le contrôleur de servos. C’est la partie qui mérite le plus d’attention.
L’adresse sur le bus I2C est 0x40.Dans le programme on utilisera l’angle de rotation (0 à 180) pour le positionnement des servos. La rotation sera effectuée par le contrôleur PWM qui utilise des impulsions dont la largeur (500 à 2500µs). varie en fonction de l’angle. La communication avec le contrôleur se fera par une fonction « servowrite » (sera développé plus loin) qui effectuera au préalable une conversion angle-impulsion. Les variables MAX et MIN servent à cette conversion. En fonction de modèle de servo ces valeurs peuvent changer. Dans notre cas les servos MG996 ont un angle de rotation couvrant 180°. Les servos de remplacement DS3225 ont un angle de 270°. On gardera la rotation sur 180° car une rotation sur 270° n’est mécaniquement pas possible pour ce bras.
Dans le montage certains servos ne peuvent pas tourner sur toute la plage des 180°. Ils seront bloqués mécaniquement par les supports et se mettrons à chauffer. Il convient donc de les protéger en limitant leur course. Le tableau « tabanglim » contient les valeurs limites de rotation pour chaque servo (min et max).
Le tableau « homepos » contient la position du bras à la mise sous tension. Il est recommandé avant la mise hors tension de ramener le bras dans cette position initiale. Au redémarrage le bras sera alors déjà en place. Si le bras est dans une autre position un mouvement brutal s’effectuera à la mise sous tension. Il convient d’être prudent à la mise sous tension.
Toutes ces valeurs sont à mettre à jour si vous réaliser ce projet !
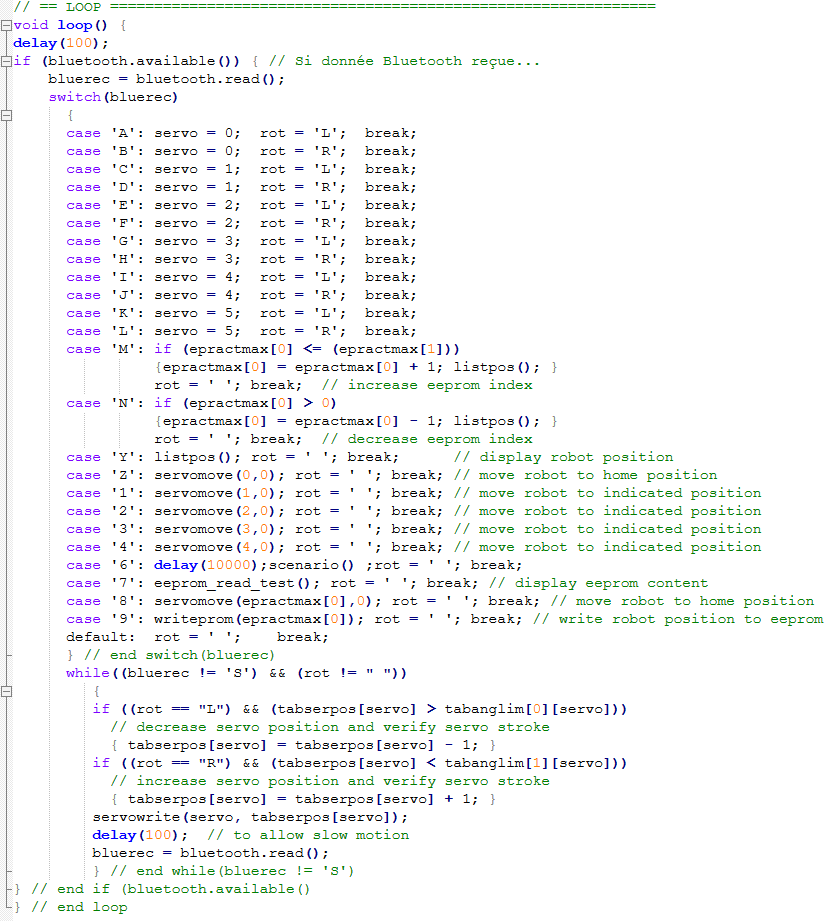
Structure des informations stockées au début de la mémoire Eeprom : AMHHHHHH111111222222333333444444
Chaque caractère correspond à un octet. A est la valeur du pointeur de séquence actuel (1 à n). M est la valeur de la dernière séquence enregistrée (4 ci-dessus). 111111..444444 sont les positions des servos pour la séquence 1…4. HHHHHH est la séquence 0 et correspond à la position de départ du bras.
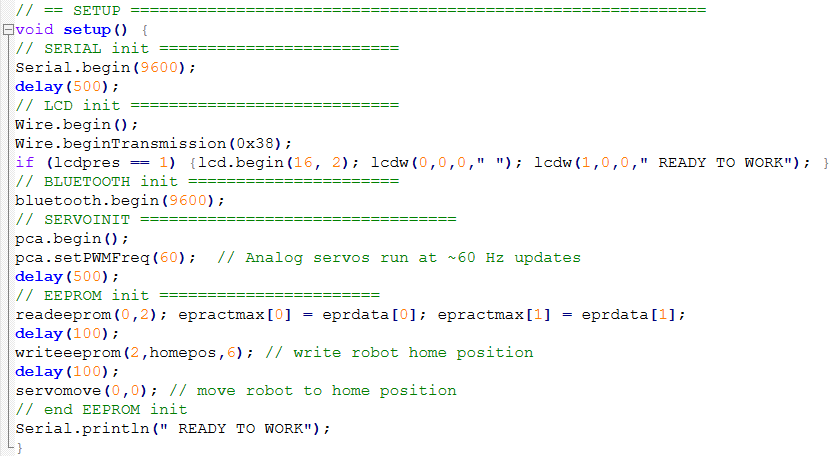
A la mise sous tension HHHHHH est regravé dans l’eeprom à partir du tableau « homepos » ; A et M sont lus depuis l’Eeprom et stockés dans le tableau « expactmax ».
admin
En attendant les nouvelles du concepteur j’ai trouvé des applications similaires.
Bluetooth Terminal (BT Serial)
ou
Serial Bluetooth Terminal ou Serial USB Terminal
ou
Bluetooth Terminal HC-05
Moyennant une adaptation c’est jouable.
Si vous avez besoin d’aide laisser un message.
LC
Merci beaucoup pour vos réponses rapides. Je vais regarder les applications que vous proposez.
admin
J’ai lancé un appel au développeur https://github.com/CSAapps
“Hello, I have published articles with robots that use the app. This app is no longer visible in google store. Where can I find it because it is very usefull and there is no app of this kind. Sincerely. Dan”
admin
Bonjour, effectivement l’application Android n’est plus visible. Je vais faire des tests avec d’autres app. Je vous tiens au courant. Cordialement DGA
LC
Bonjour
Je ne trouve pas l’application Bluetooth remote dans le store Android. Pouvez-vous m’aider ?
Merci beaucoup
admin
Bonjour, mettre avant le “case ‘ A'” une impression sur le moniteur série Serial.println(bluerec); Ainsi on peut vérifier ce qui arrive vraiment dans le programme en provenance du smartphone. Si vous voulez on pourra communiquer par une adresse mail et échanger des fichiers et en particulier un programme de test du bluetooth.==> (dan10@mail.info-suivi.top)
admin
Bonjour, dans la fonction setup() mettre en commentaire les lignes entre « EEPROM init » et « End EEprom init ». Dans la partie loop() ne se servir que des cases A à L. Cela devrait fonctionner.
Michel WINKEL
Merci pour la réponse, je vais essayer ça prochainement
Michel WINKEL
Bonjour, sans EEPROM AT24C256, j’ai mis en commentaires les lignes entre “EEPROM Init” et “End EEPROM init” et le téléversement s’effectue bien sans erreur.
Je ne possède pour l’instant qu’un seul servo MG995 et je souhaiterais (avant d’acheter 5 servo complémentaires) tester le codage et le câblage qu’avec ce seul servo et ça ne marche pas.
J’utilise les éléments suivants : Arduino Uno, PCA9685, Bluetooth HC05 et MG995. J’ai branché le servo sur la connection “0” du PCA9685.
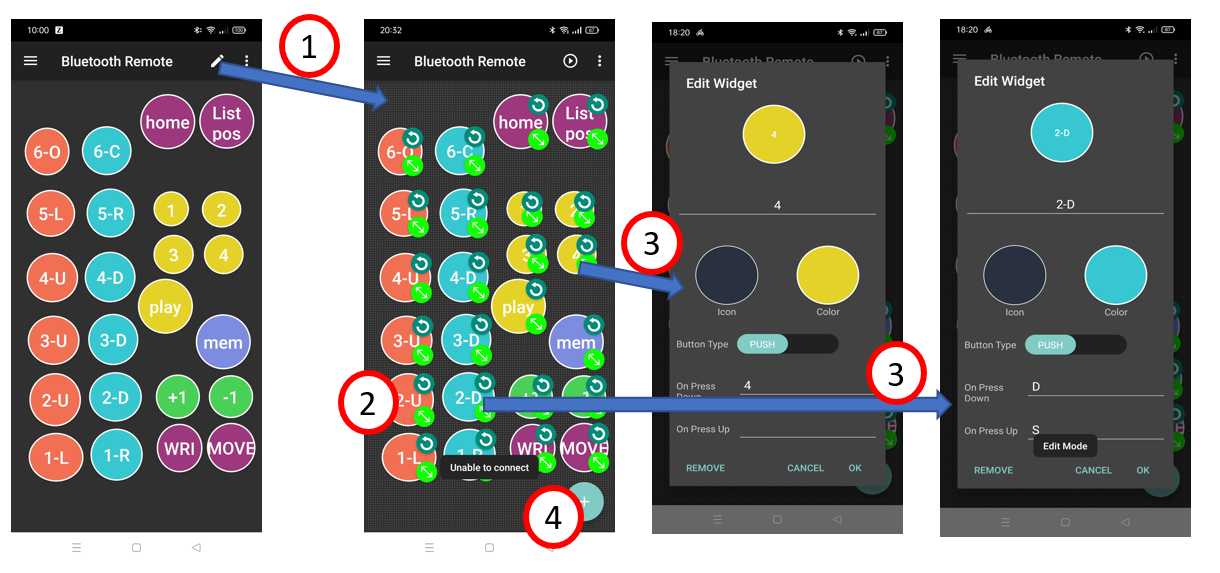
Configuration Bluetooth Remote, bouton 1-L : PUSH, On Press Down “A”, On Press Up “S”, bouton 1-R : PUSH, On Press Down “B”, On Press Up “S”.
La connexion avec HC05 se fait bien (clignotements espacés de la LED), mais le servo ne bouge pas lorsque j’actionne les boutons 1-L et 1-R.
Pourriez-vous m’aider à résoudre mon problèmé ? Merci d’avance.
Michel WINKEL
Bonjour,
Je souhaiterais dans un premier temps réaliser un bras articulé sans Eeprom AT24C256. Est-il possible d’utiliser votre codage tel quel, sinon quelles modifs faut-il éffectées ?
Ibrahem
Hi sir daniel i don’t understand how to program the bluetooth remote can you help me
admin
To control the arm you use a smartphone or tablet with the “Bluetooth Remote” application.