Objectif
La robotique est accessible à tous et de plus elle est simple à piloter. Néanmoins il convient de porter une attention particulière à certains aspects techniques. Et plus particulièrement à la manipulation des servomoteurs.
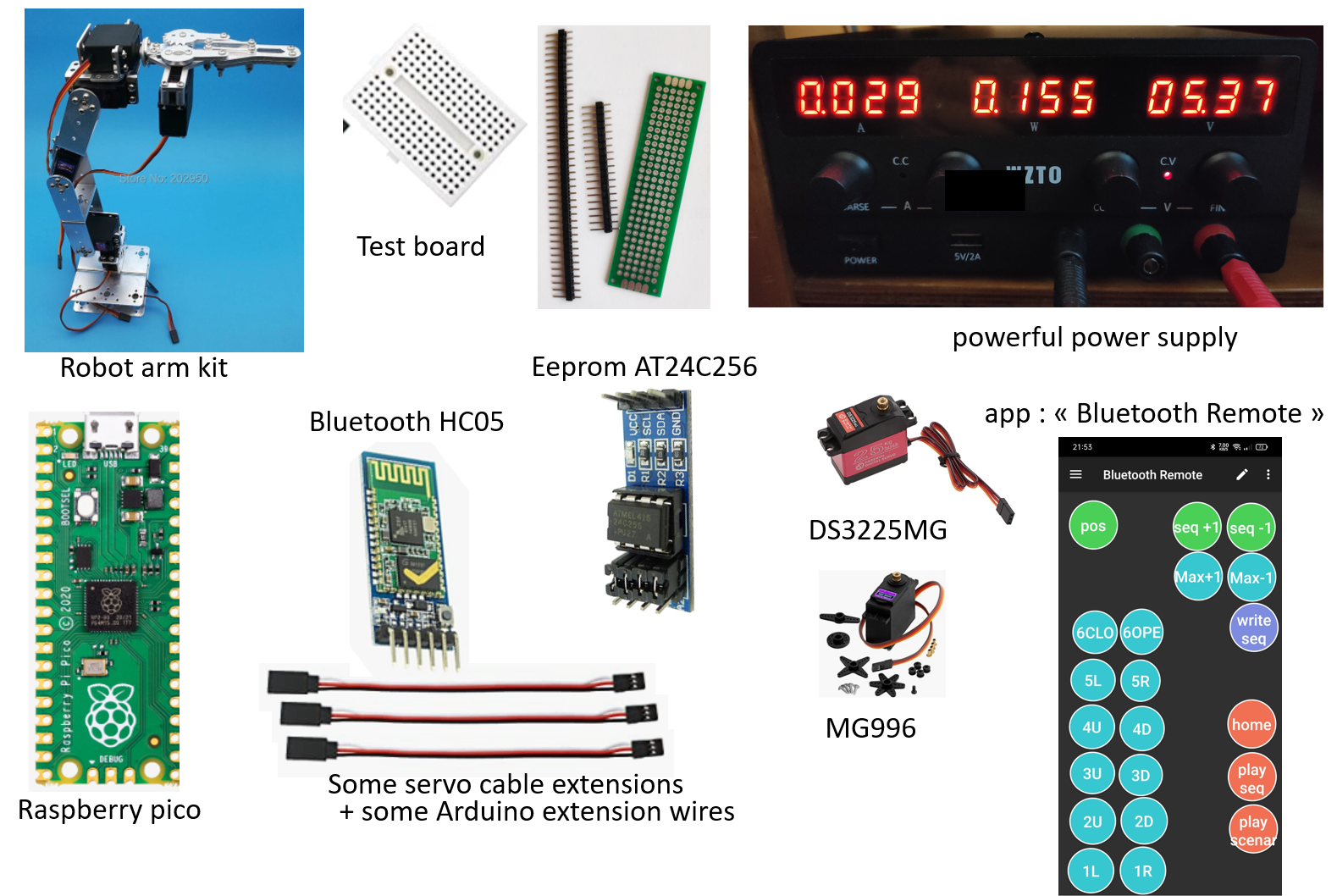
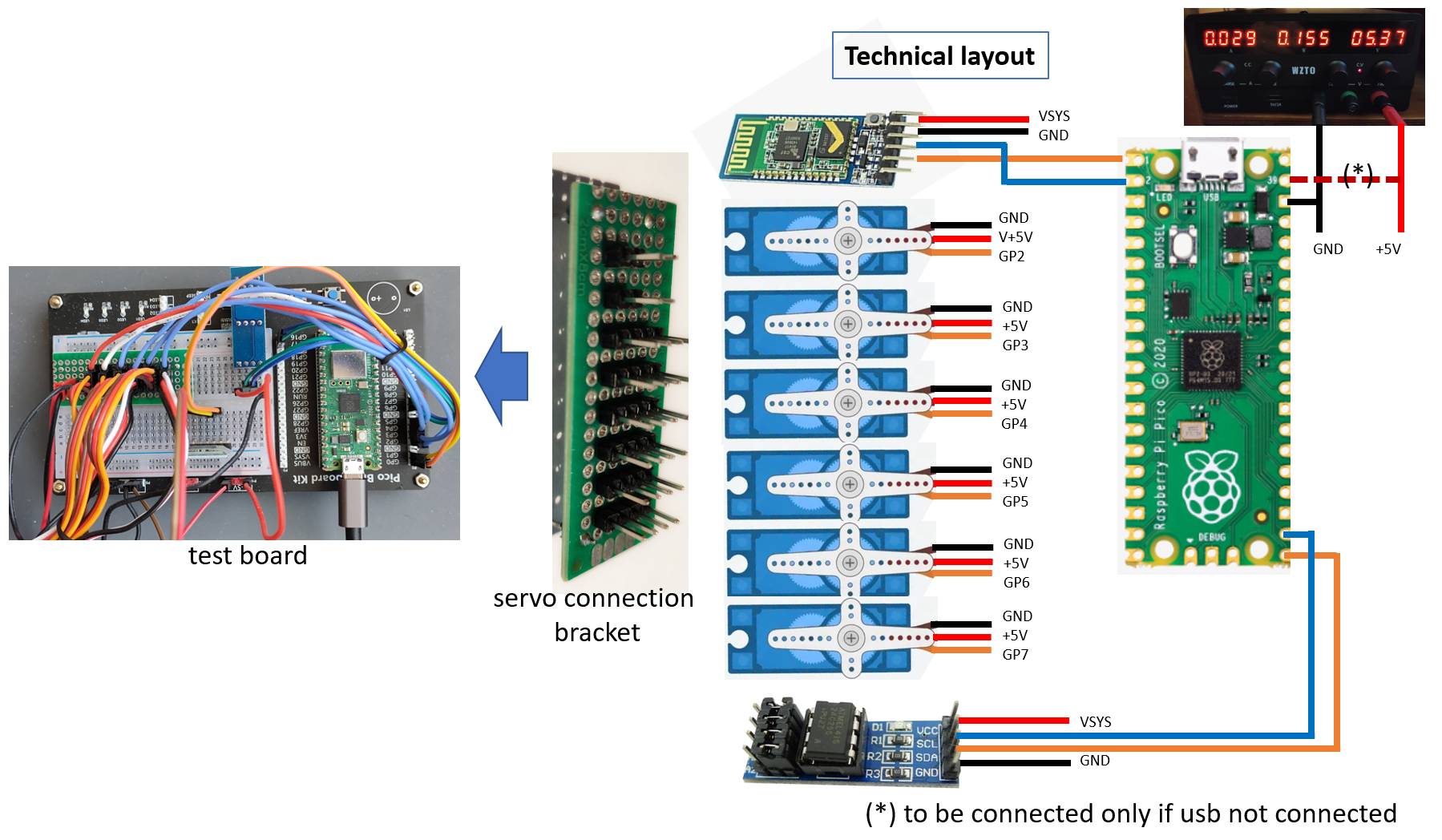
Le projet utilise des composants faciles à procurer. Une fois les composants assemblés ils seront coordonnées par un programme micropython avec l’application Thonny.
Une version précédente de ce projet était pilotée par arduino-IDE. La nouvelle génération de microcontrôleurs donne une nouvelle orientation aux montages et à la programmation. Le language micropython me paraît plus simple à utiliser et en particulier l’interface Thonny. Des trois projets d’automatisation d’un bras articulé publiés c’est le plus abouti.
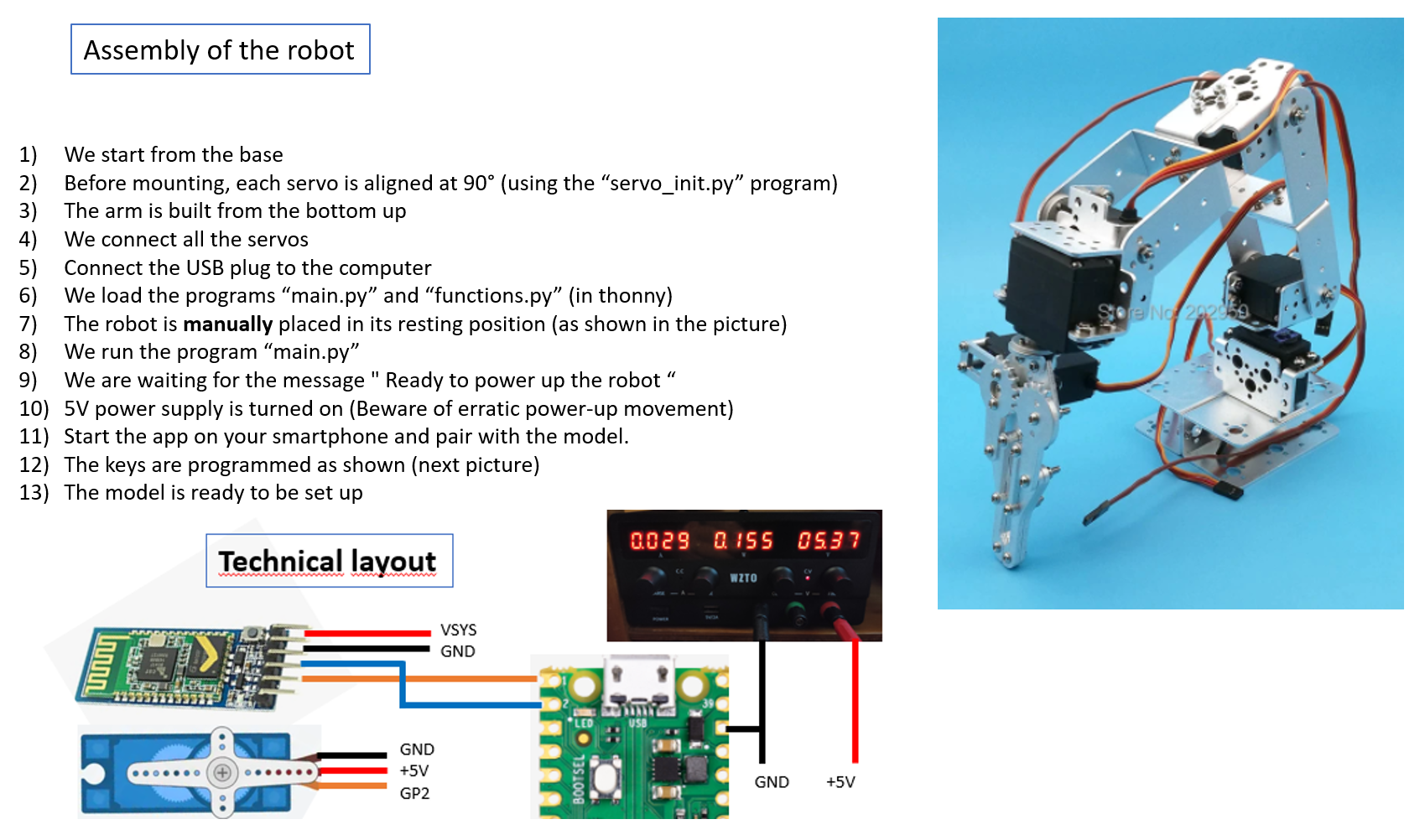
Le robot est un bras articulé qui se déplace sur trois axes et est piloté par 6 servomoteurs.
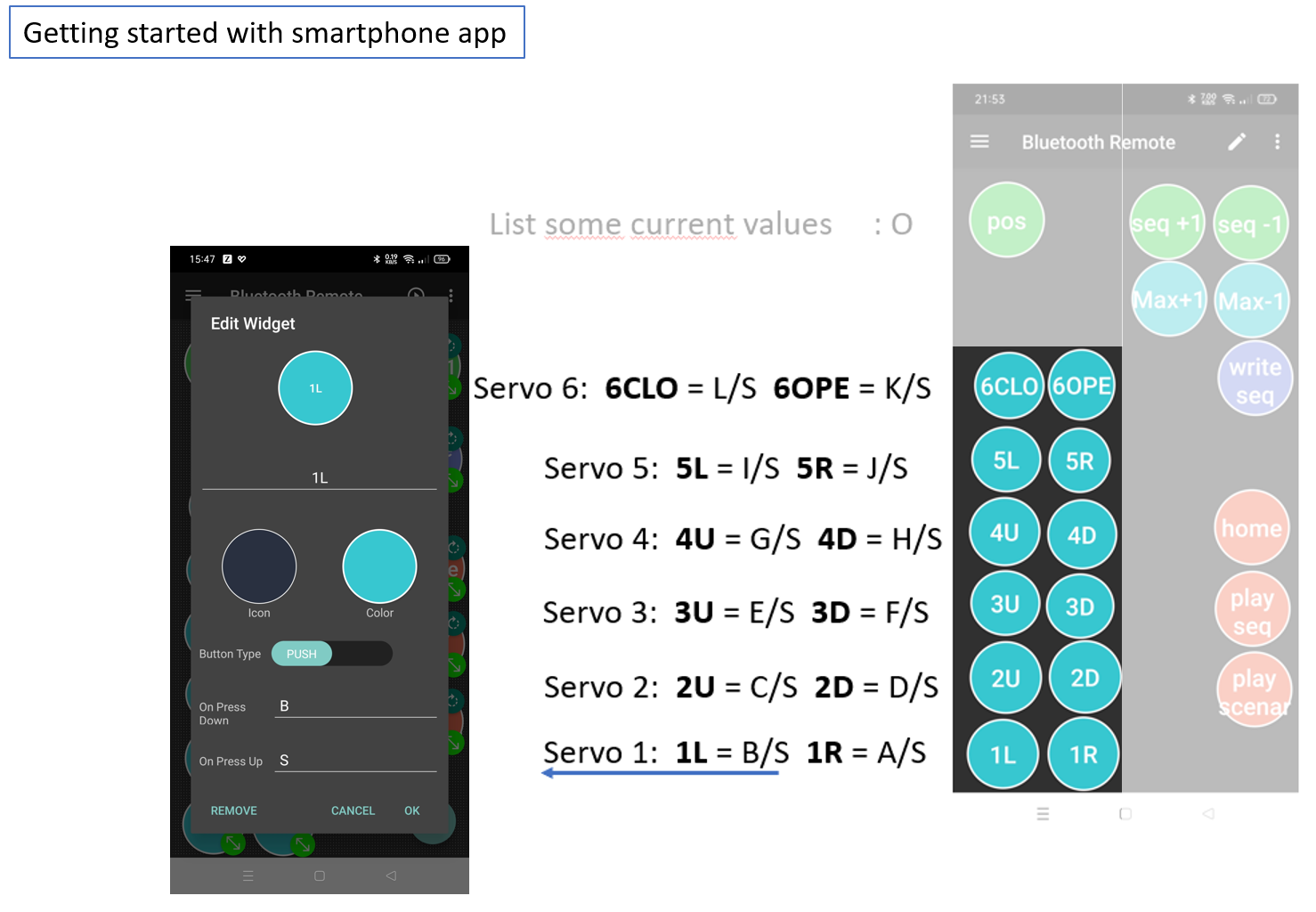
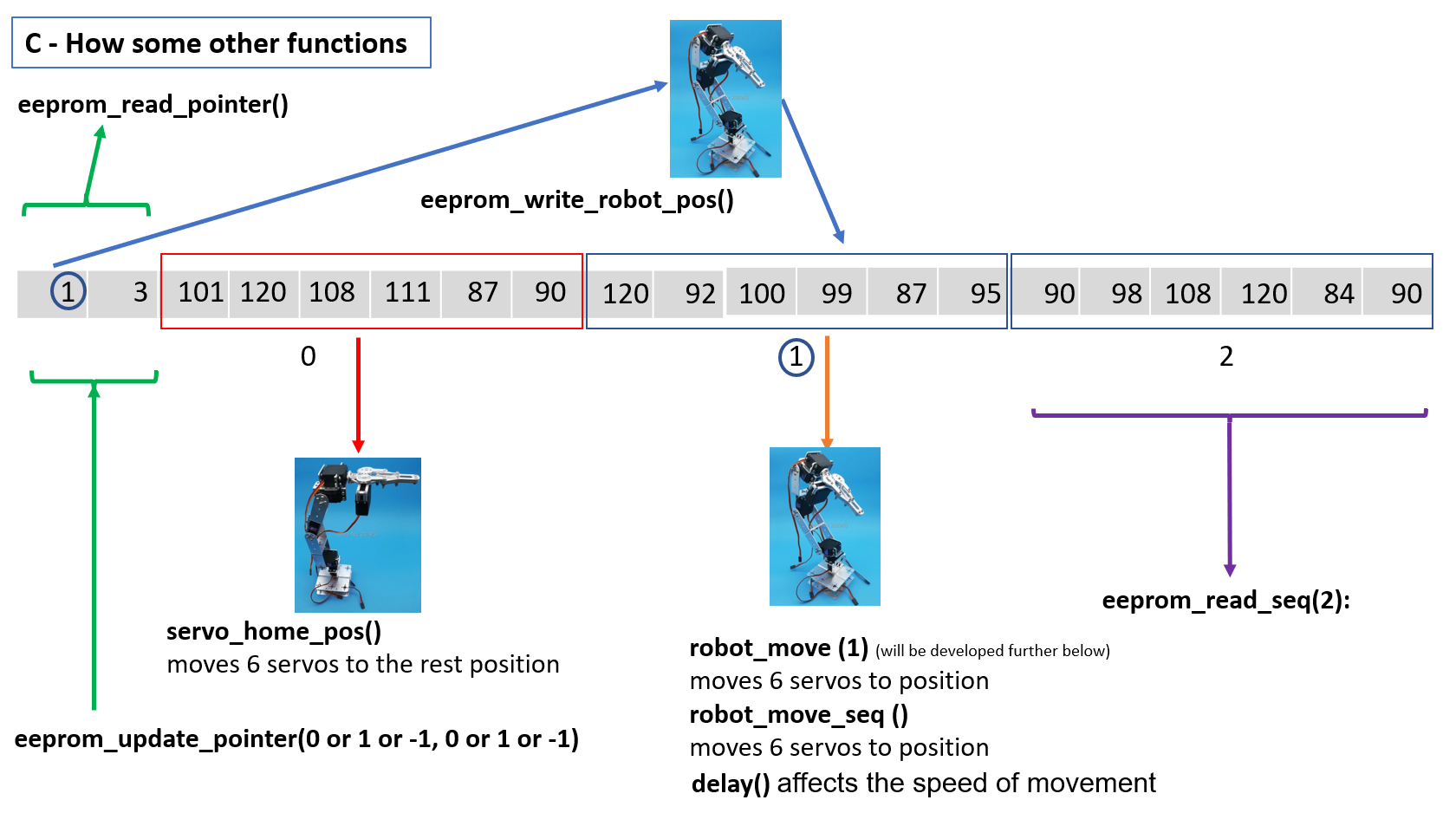
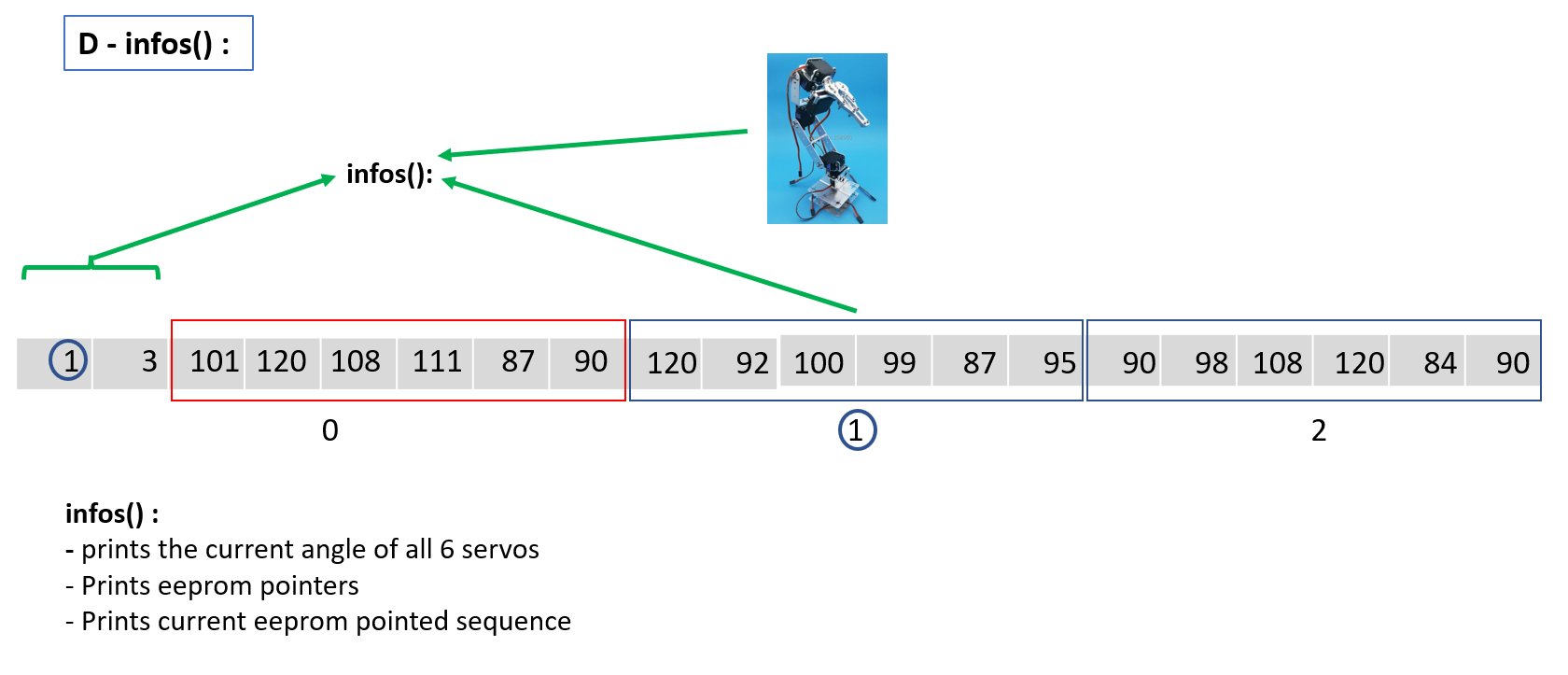
La particularité du programme est de pouvoir mémoriser les positions successives du bras.
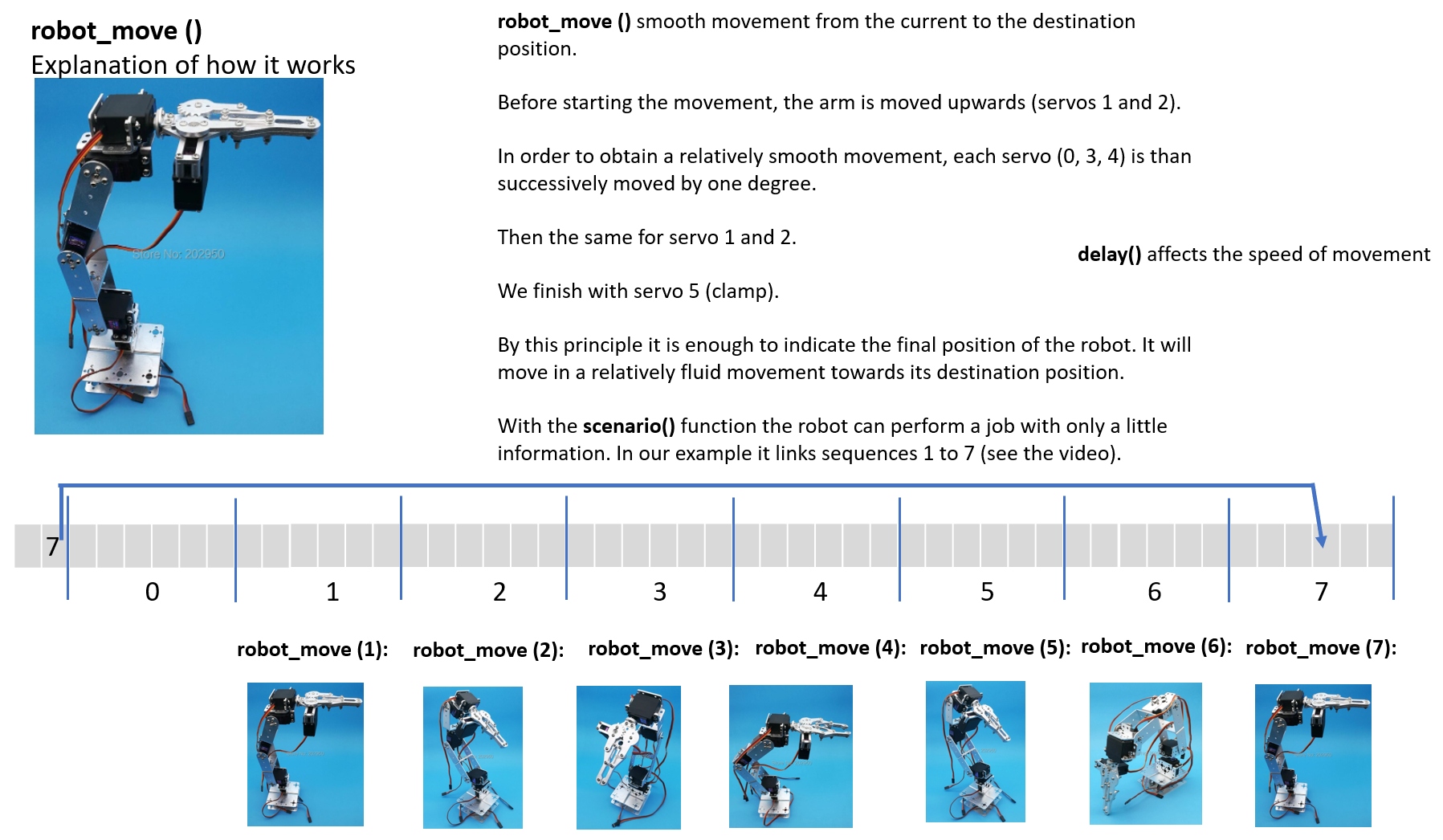
On pourra ensuite demander au programme de placer le robot successivement dans les positions enregistrées comme visible sur la vidéo. Pour la vidéo uniquement 7 positions ont été mémorisées.
Le programme se charge de fluidifier le mouvement.
Les positions resteront mémorisées lorsque le courant est coupé.
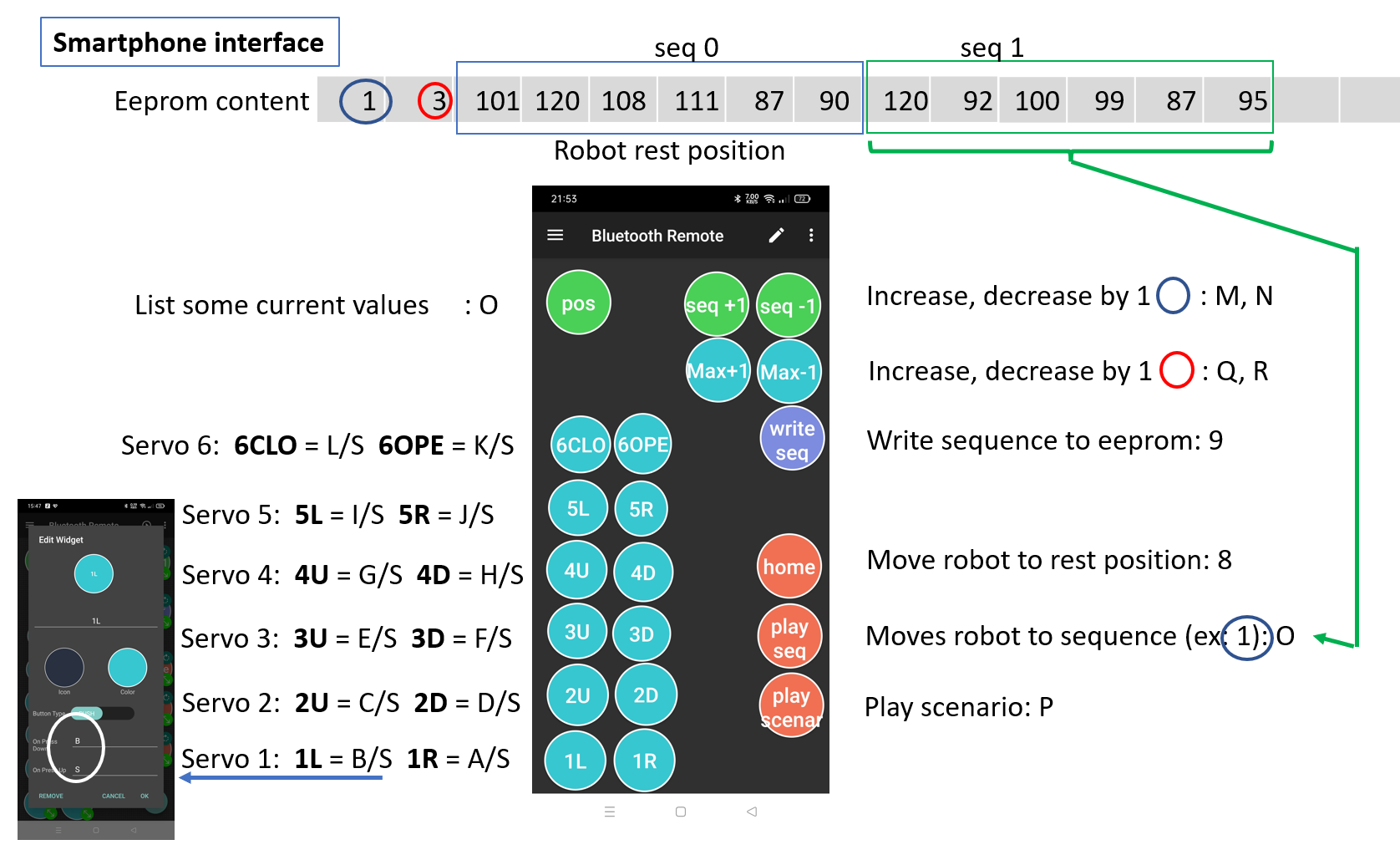
Le tout se pilote à l’aide d’un smartphone utilisant une app Bluetooth.
Laisser un commentaire